|
На данной странице представлена ознакомительная часть выбранного Вами патента
Для получения более подробной информации о патенте (полное описание, формула изобретения и т.д.) Вам необходимо сделать заказ. Нажмите на «Корзину»
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ |  |
Номер публикации патента: 2184340 |  |
| Редакция МПК: | 7 | | Основные коды МПК: | F42B010/60 F42B015/01 B64C013/36 | | Аналоги изобретения: | КОСТИН С.В. и др. Рулевые приводы. - М.: Машиностроение, 1973, с.103, 104 ВАВИЛОВ А.А., СОЛОДОВНИКОВ А.И. Экспериментальное определение частотных характеристик автоматических систем. - М. - Л.: Госэнергоиздат, 1963, с.124-133. RU 95100688 А1, 10.04.1997. DE 4135557 A1, 05.06.1993. US 5042742, 27.08.1991. |
| Имя заявителя: | Государственное унитарное предприятие "Конструкторское бюро приборостроения" | | Изобретатели: | Фимушкин В.С.
Гусев А.В.
Тошнов Ф.Ф. | | Патентообладатели: | Государственное унитарное предприятие "Конструкторское бюро приборостроения" |
Реферат | |
Изобретение относится к оборонной технике, к управляемым ракетам и снарядам. Технический результат - упрощение пневматического рулевого привода вращающейся по крену ракеты, повышение точности и надежности его работы, упрощение контроля динамики привода. Поставленная задача решается за счет того, что в разомкнутый пневмопривод системы управления вращающейся ракетой, содержащий усилитель мощности и рулевую машину, связанную с рулями, введены сумматор, один вход которого является входом привода и соединен с выходом аппаратуры управления ракеты, двухпозиционное реле с отрицательной петлей гистерезиса изменяемой ширины, выход которого подключен к входу усилителя мощности. Привод также снабжен генератором линеаризирующих колебаний, выход которого подключен к второму входу сумматора, и устройством задания фазового опережения привода по времени полета ракеты, выход которого подключен к входам управления шириной петли гистерезиса двухпозиционного реле. Контроль динамики проводят по времени эквивалентного запаздывания при давлении питания, соответствующем выбранному режиму полета ракеты, например максимальной и минимальной скоростями полета, и съеме информации об угловом положении рулей с выхода датчика угла поворота рулей, на вход двухпозиционного реле с отрицательной петлей гистерезиса изменяемой ширины с выхода генератора сигналов подают периодический сигнал прямоугольной формы с частотой, равной, например, максимальной частоте вращения ракеты по крену, с амплитудой, соответствующей максимальному перемещению рулей (по упорам), на регистрирующем устройстве фиксируют угол поворота рулей и задаваемый сигнал, определяют время трогания, движения и срабатывания привода при перемещении рулей от одного крайнего положения (упора) к другому и обратно, определяют время τэ эквивалентного запаздывания привода по определенной математической зависимости. 2 с.п. ф-лы, 4 ил.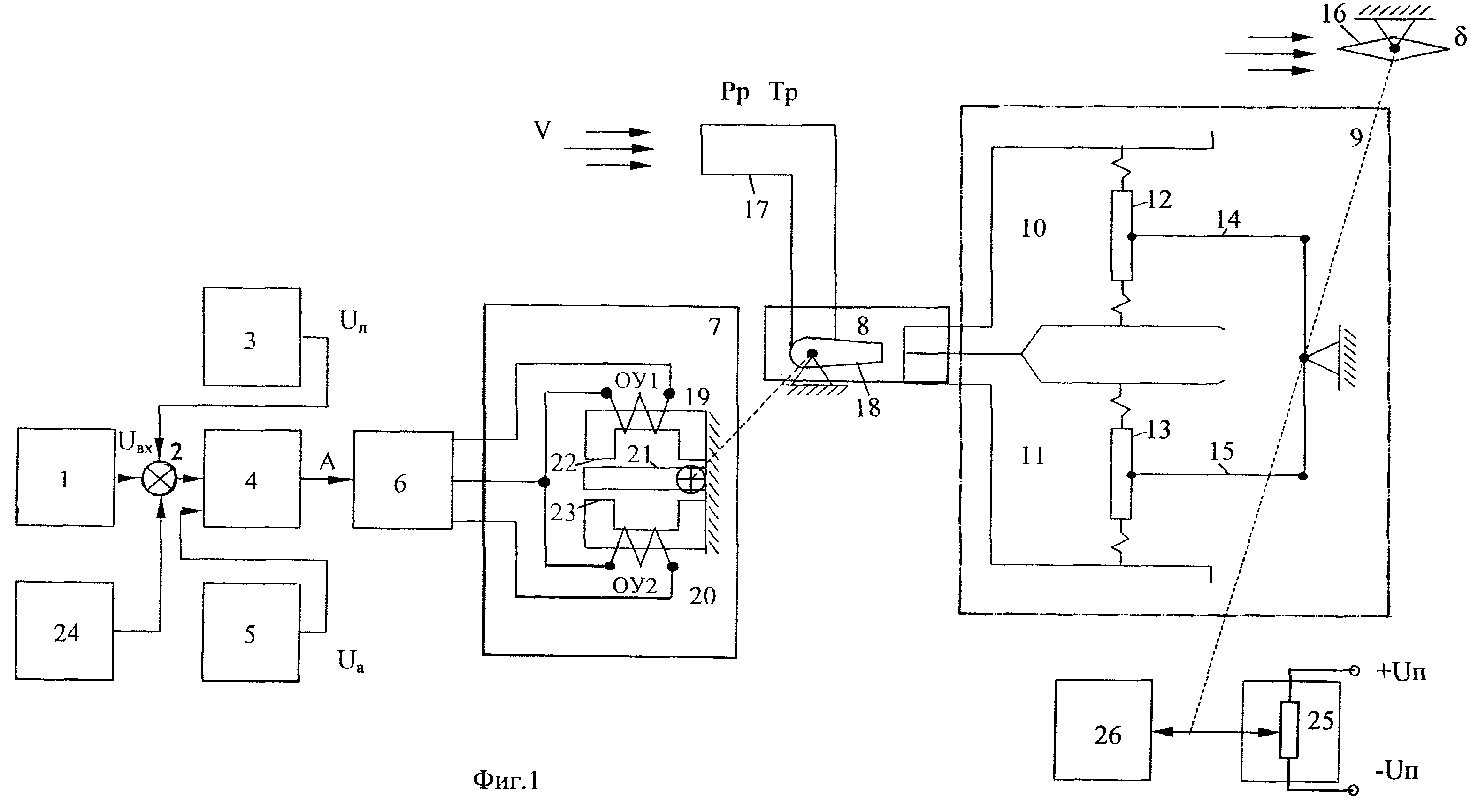
|
 Получить полное описание патента
Получить полное описание патента